Vedi traduzione automatica
Questa è una traduzione automatica. Per vedere il testo originale in inglese cliccare qui
#Tendenze
L'innovazione va di pari passo
I laccetti del legame, la biancheria da letto del popolare, strappo aprono una borsa delle patatine fritte - la lista delle cose che sono difficili da fare con una mano va senza sosta.
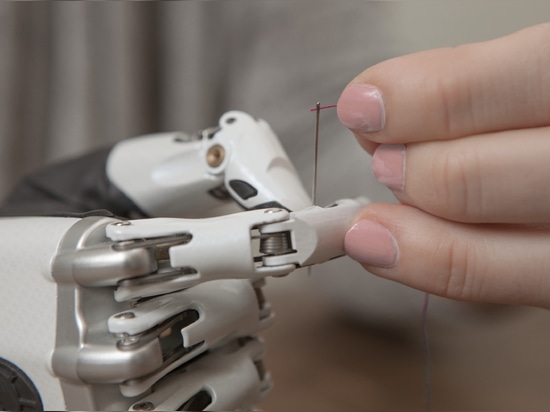
La gente con un'amputazione congenita o che ha perso una mano con un incidente o una malattia è confrontata con tali ostacoli ogni giorno. Per rendere la vita quotidiana più facile, la società britannica più ripida ha sviluppato la protesi myoelectric bebionic della mano. È controllata dai segnali myoelectric generati dalle contrazioni del muscolo nel braccio e può eseguire i modelli differenti multipli della presa selezionati dall'utente. L'innovazione più recente porta al mercato le donne adatte della piccola mano bebionic, gli uomini di più piccola altezza o gli adolescenti. I motori di densità di alto potere di FAULHABER assicurano che la protesi possa afferrare uniformemente, rapidamente e saldamente e conservare la forza della presa senza rilassarsi.
Le protesi funzionali sono conosciute ad la maggior parte di noi soltanto in film della fantascienza che danno alle estremità artificiali la forza sovrumana. Al contrario, le protesi bioniche della mano non rendono all'indossatore un supereroe in realtà. Ma possono permettere molte cose per loro che sono normali per la maggior parte della gente. Nicky Ashwell, il primo utente di piccola mano bebionic è deliziato infine per potere guidare una bici: «Non la ho provata mai prima perché ero impaurito di caduta fuori la bici sulle superfici irregolari o di mettere la mia parte posteriore nell'ambito del genere sbagliato di sforzo.»
Movimento intuitivo
La protesi myoelectric bebionic pesa fra 400 e 600 grammi ed è circa pesante come mano naturale. È controllata facendo uso dei segnali elettrici minuscoli nel corpo. Questi sono generati quando un muscolo si contrae e può essere individuato con gli elettrodi sulla pelle
- lo stesso modo come ECG nei sistemi diagnostici del cuore. Due elettrodi sono integrati nell'incavo della protesi, che individuano il segnale elettrico di myo e sono di andata loro al
elettronica di controllo. Questi segnali sono amplificati ed usati attivare i cinque piccoli motori elettrici (uno per ogni cifra), che muovono le dita ed il pollice che inducono la mano a aprirsi e chiudersi. Di conseguenza, la forza della contrazione del muscolo controlla la velocità e la forza commovente: un segnale debole genera un movimento lento, un forte segnale genera un movimento rapido. I muscoli che sono utilizzati per aprire e chiudere la protesi della mano sono realmente responsabili del movimento del polso in una mano naturale. Il suo indossatore deve imparare che ora ha una funzione differente. «Il cervello umano è incredibile adattabile. Dopo una scarsa quantità di tempo, la gente realizza il movimento intuitivo come come gli autisti di automobile fanno un passo sul freno quando vogliono fermarsi,» dice Ted Varley, direttore tecnico a più ripido.
Motori supplementari per più controllo
La prima mano myoelectric è venuto sul mercato all'inizio degli anni 80. Sono stati guidati da un singolo motore e soltanto hanno avuti un meccanismo commovente semplice: il pollice, l'indice e le dita medie hanno potuto essere chiusi per una presa della tenaglia. L'anello e le piccole dita erano soltanto disponibili per le ragioni cosmetiche e non hanno avuti forza commovente. Questo concetto è stato cambiato fondamentalmente per gli intorno dieci anni bebionic fa. «Abbiamo determinato che la gente accetta la forza commovente più bassa per dito se ottengono la più flessibilità,» spiega Ted
Varley. Per controllare le diverse dita, ogni dito sulla mano bebionic è fornito di suo proprio motore elettrico. I quattro motori per le dita sono posizionati nella palma della mano, il quinto situato nel pollice stesso. I codificatori sono integrati nei motori che individuano precisamente in qualunque momento la posizione del dito.
Grazie a singolo controllo, le dita possono essere sistemati in complessivamente 14 modelli differenti della presa. La presa chiave, che alza ed abbassa il pollice con le dita flesse gli permette di tenere gli oggetti piani quali i piatti, le chiavi o le carte assegni. La presa di gancio permette agli oneri gravosi di fino a 25 chilogrammi di essere portata e nel caso del dito indice steso l'uso delle tastiere e dei telecomandi è permesso. Con la presa di potere, il pollice non è in posizione opposta e tutte le dita vicine finché essi
resistenza di incontro. Ciò è usata per afferrare gli oggetti di forma irregolari quali i vetri di vino. «Questa posizione guarda molto più naturale di una presa della tenaglia e fornisce una presa molto più stabile quando tutte le dita sono utilizzate,» sollecita Varley.
Per cambiare fra i diversi modelli della presa, l'indossatore bebionic inoltre utilizza i muscoli del braccio. Se un altro segnale «aperto» è dato quando la mano è già aperta, la protesi si trasforma il modo seguente. Un segnale supplementare è fornito dal pollice che è mosso verso il lato delle dita o può essere
entrato nella posizione opposta. I modelli differenti della presa sono disponibili secondo cui la posizione del pollice è scelta. Quindi, il proprietario può decidere per stessi della mano in che dei 14 tipi possibili della presa vogliono usare ed in quale ordine sono richiesti ed usando il software possono programmare individualmente la protesi.
Autostima aumentata
La mano bionica rende molte attività di ogni giorno più facili. «Realmente, è spesso le piccole cose che diventano più facili con la protesi. Per riassumere, conduce ad una qualità della vita chiaramente migliore,» spiega Ted Varley. Ancora, la mano artificiale inoltre ha un grande effetto psicologico: «Molti utenti riferiscono che la loro sensibilità dell'autostima è aumentata con l'uso di una mano bebionic con la protesi alta tecnologia che attira l'interesse ed il fascino.»
In questo contesto, la progettazione attraente della protesi inoltre svolge un ruolo importante con l'uso di alluminio e di acciaio inossidabile con conseguente progettazione supplichevole. Ancora, la progettazione esteriore inoltre si è adattata quanto più rigorosamente possibile all'aspetto naturale. «Il nostro approccio era piuttosto insolito in protesi con lo sviluppo della terza generazione di bebionic: In primo luogo abbiamo sviluppato l'alloggio ed allora cercati le soluzioni come come le diverse componenti potrebbero essere
integrato,» sottolinea Varley. «Cinque anni fa, questo non sarebbe stato possibile per il piccolo a mano la tecnologia non è stato avanzato abbastanza.» Inoltre, i micromotors di CC dello SR 1024 di serie che sono stati predestinati per questa applicazione avevano luogo ancora nella fase di sviluppo una volta più ripido girato a FAULHABER con questo progetto nel 2013. Il personale addetto al programma da entrambi i lati poi ha accelerato lo sviluppo della protesi di serie e della mano del motore allo stesso tempo. Riunioni regolari del PIÙ RIPIDO
ed i gruppi di sviluppo di FAULHABER hanno avuto luogo nel Regno Unito ed in Svizzera insieme a e facilitato dagli elettro sistemi meccanici (SME), il partner esclusivo di distribuzione di FAULHABER in Gran Bretagna. Questa cooperazione intensiva ha provocato un motore con un rapporto eccezionale del elettrico volume per le dita e la a ha annunciato l'azionatore per il pollice che porta questa estesa cooperazione allo sviluppo ad una riuscita conclusione.
Segni superiori per la prestazione
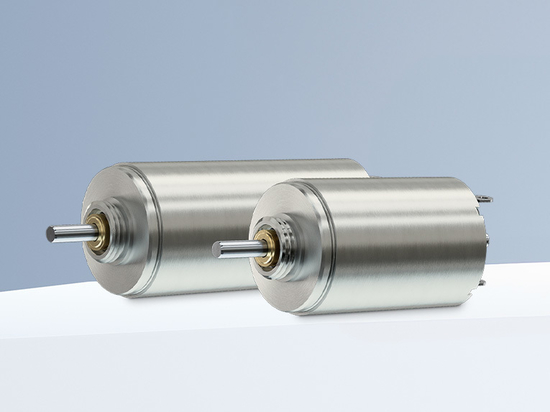
La nuova CC-micromotor dello SR 1024 di serie è genuino la cosa migliore nella classe e nel più potente per la sua dimensione nel mercato. Con un diametro di 10 millimetri e di una lunghezza di 24 millimetri, consegna una valutazione di coppia di torsione della stalla del mNm 4,6. Ancora, offre la coppia di torsione coerente alta attraverso l'intera gamma di velocità derivando dalla curva piana coppia di torsione/della velocità. La forte prestazione, tra l'altro, è permessa tramite lo sviluppo di nuova progettazione della bobina che contiene 60 per cento più di rame del suo predecessore ed ha
combinato con un magnete di terre rare potente. Per rendere il movimento calmo come possibile, la mano artificiale utilizza i gearheads planetari basati sulla serie 10/1 nelle versioni su misura che non contengono alcuna plastica. «Una sfida significativa era lo sviluppo del sistema di azionamento lineare che ha dovuto essere integrato nel pollice», dice Tiziano Bordonzotti, capo vendite a FAULHABER MINIMOTOR. Grazie ai 4 punti di alta precisione contattano il cuscinetto dalla filiale di FAULHABER, micro sistemi di precisione (MP), specialisti in cuscinetti stessi di alta precisione e micro sistemi, era possibile fare il più breve del sistema di azionamento significativamente confrontato al
concorrenza. Le caratteristiche uniche del sopportare del contatto di 4 punti significano che anche con una più piccola dimensione che i sistemi sopportanti alternativi ancora resiste all'alto carico assiale richiesto in questa applicazione. L'azionatore completo del pollice rimane all'interno di una lunghezza totale di meno di 49mm e può resistere ad una forza assiale di fino a 300 N.
Ted Varley è eccitato tramite il risultato della collaborazione: «La piccola mano bebionic è la protesi della mano myoelectric più realistica sul mercato e non sarebbe stato possibile realizzare questo progetto senza la stretta collaborazione del personale addetto al programma di FAULHABER.»