Vedi traduzione automatica
Questa è una traduzione automatica. Per vedere il testo originale in inglese cliccare qui
#Tendenze
{{{sourceTextContent.title}}}
Tre tipici robot a coordinate cartesiane
{{{sourceTextContent.subTitle}}}
Robot lineare, robot a portale e robot a traliccio.
{{{sourceTextContent.description}}}
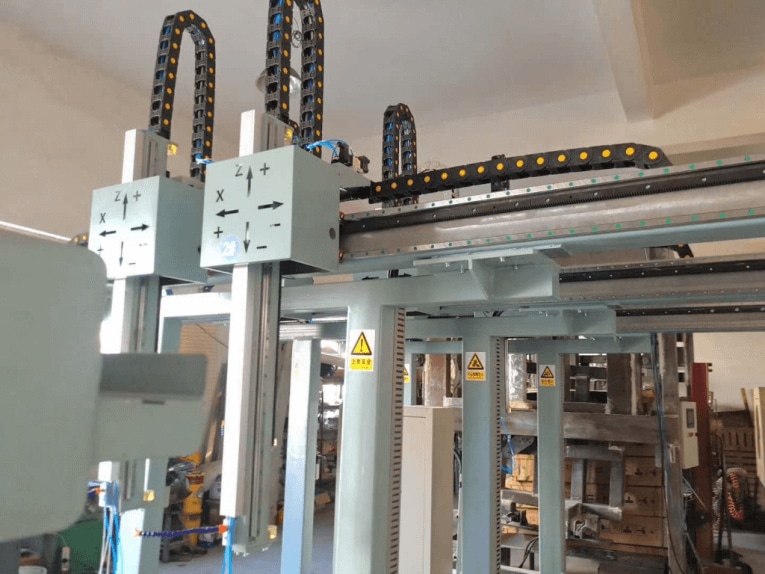
I robot cartesiani o lineari possono essere indicati collettivamente come robot industriali, in cui i tre assi di controllo (asse XYZ) si muovono lungo una linea retta invece di ruotare. Allo stesso tempo, gli assi di controllo (asse XYZ) hanno un angolo di 90° tra loro e i tre giunti scorrevoli si muovono linearmente avanti e indietro. Pertanto, i robot cartesiani sono talvolta chiamati robot lineari.
Robot lineare
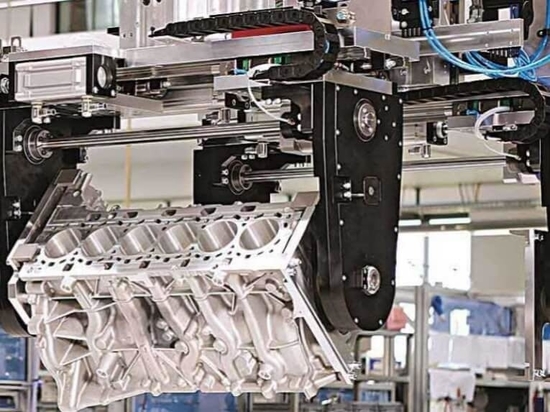
Poiché i tre giunti scorrevoli del robot cartesiano possono muoversi linearmente verso l'alto e verso il basso, a destra e a sinistra, avanti e indietro, si parla di robot lineare. Le soluzioni a braccio di controllo dei robot cartesiani sono comunemente utilizzate nelle lavorazioni CNC, nella stampa 3D, nelle fresatrici e nei plotter. Anche la macchina di prelievo e posizionamento può funzionare con un robot lineare a coordinate cartesiane. Un tipo di robot cartesiano prevede che entrambe le estremità del drago siano supportate orizzontalmente.
Robot a portale
Il robot a portale, o sistema a portale, è uno dei robot cartesiani. Nella sua funzione d'uso deve essere supportato da entrambe le estremità in direzione orizzontale, quindi ha la forma di un portale e viene chiamato robot a portale. Il gantry è supportato da entrambe le estremità.
Robot cartesiano
Le coordinate cartesiane sono un termine generale per indicare il sistema di coordinate rettangolari e il sistema di coordinate oblique. Due assi numerici che si intersecano nell'origine formano un sistema di coordinate radiali piane. Se le unità di misura sui due assi numerici sono uguali, si parla di sistema di coordinate cartesiane. Un sistema di coordinate cartesiane in cui i due assi numerici sono perpendicolari tra loro si chiama sistema di coordinate cartesiane rettangolari, altrimenti si chiama sistema di coordinate cartesiane obbligate.
Il robot cartesiano si riferisce ai robot a coordinate cartesiane o ai robot a portale cartesiano XY
Il robot a coordinate cartesiane è un manipolatore multiuso in grado di realizzare il controllo automatico, la riprogrammazione e la costruzione di relazioni spaziali cartesiane con gradi di libertà. Conosciuto anche come robot a coordinate cartesiane di grandi dimensioni, multi gradi di libertà e in grado di costruire relazioni spaziali cartesiane con gradi di libertà, è anche chiamato robot a coordinate rettangolari di grandi dimensioni. Il suo comportamento di lavoro si basa principalmente sul completamento del movimento lineare lungo gli assi X, y e Z.
Robot a traliccio
Il robot a traliccio è un tipo di robot industriale completamente automatico basato sul sistema di coordinate X, Y e Z ad angolo retto, in grado di regolare la posizione del pezzo in lavorazione o di realizzare la movimentazione della traiettoria del pezzo. In realtà, il nome del robot a traliccio è robot a portale, perché il portale è spesso chiamato gantry e il gantry può anche essere chiamato truss, quindi c'è il detto di robot a traliccio.
In sintesi, i principi di funzionamento dei robot a traliccio, a portale e lineari sono gli stessi. Sono tutti una sorta di robot cartesiani per applicazioni diverse.