Vedi traduzione automatica
Questa è una traduzione automatica. Per vedere il testo originale in inglese cliccare qui
#News
{{{sourceTextContent.title}}}
Componenti del centro e di classificazione del robot coordinato cartesiano
{{{sourceTextContent.subTitle}}}
posizionamento, azionamento, controllo e sistema terminale
{{{sourceTextContent.description}}}
Le coordinate rettangolari della classificazione del robot:
1, secondo l'uso dei punti: robot per saldatura, robot di trasporto con palette, robot della colla (dispensare), robot di rilevazione (monitoraggio), ordinanti i robot (di classificazione), i robot per montaggio, i robot di EOD, i robot medici, i robot speciali, ecc.
2, secondo i punti strutturali della forma: robot fissato al muro (della trave a mensola), robot del cavalletto, robot capovolto e l'altro robot rettangolare tipico.
3, secondo i gradi di libertà: robot di due-coordinata, robot di tre-coordinata, robot di quattro-coordinata, robot di cinque-coordinata, robot di sei-coordinata.
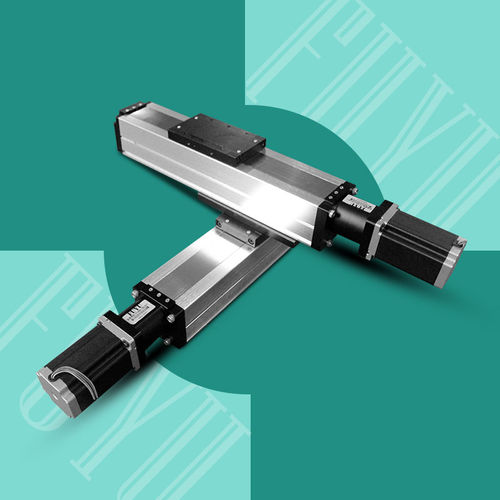
Componenti coordinate cartesiane del centro del robot - l'unità di posizionamento lineare per ridurre il costo dei robot cartesiani, accorciare il ciclo di sviluppo del prodotto, l'affidabilità di prodotto di aumento, migliorare la prestazione di prodotto, in molti paesi in Europa e l'America è stata il robot coordinato rettangolare modulare, il lineare posizionando l'unità (sistema) è il prodotto più tipico della modularizzazione.
Un'unità di posizionamento completa (sistema) consiste di parecchie parti
1, posizionando profilo del corpo: Poichè la parte di montaggio di sostegno della pista, questo profilo è differente dal profilo generale della struttura, richiede una rettitudine molto alta, planarità.
2, pista del movimento: installato sul profilo di posizionamento del corpo, direttamente sostenga il movimento del cursore. Un corpo che di posizionamento il profilo (sistema) può essere installato con una pista del movimento, o può essere installato con una pluralità di piste del movimento. Le caratteristiche e la quantità della pista direttamente colpire le caratteristiche meccaniche dell'unità di posizionamento (sistema). I tipi di piste che compongono il sistema di posizionamento sono molto comuni. Ci sono cuscinetti a sfera lineari e cuscinetti d'acciaio cilindrici diritti.
3, cursore del movimento: consiste del giunto di supporto del carico, sopportante la struttura, gruppo del rullo (gruppo) della palla, la spazzola della polvere, la cavità di lubrificazione, copertura di sigillamento. I cursori di moto sono accoppiati con le rotaie dai rulli o dalle palle. Raggiunga l'orientamento degli sport.
4, organi di trasmissione: Gli organi di trasmissione generali sono cinghia sincrona, la cinghia dentata, vite/vite della palla, lo scaffale, motore lineare ecc.
7, sopportando e sopportando sedile: usato per installare l'elemento della trasmissione e l'organo di trasmissione.
Organi di trasmissione coordinati cartesiani del robot - il sistema di azionamento del motore l'unità di posizionamento lineare (sistema) può raggiungere il moto preciso che posiziona, che è determinato dal sistema di azionamento del motore.
I sistemi di azionamento comunemente usati sono:
Sistema di azionamento del servomotore di AC/branch, sistema di azionamento del motore passo a passo, servomotore lineare/sistema di azionamento lineare del motore passo a passo. Ogni sistema di azionamento consiste di un motore e di un driver. La funzione del driver è di amplificare il segnale debole e di caricarlo sul forte motore elettrico per guidare il motore. Il motore converte i segnali elettrici rendere paricolare la velocità e lo spostamento angolare.
Nelle occasioni che richiedono l'alta dinamica, l'operazione ad alta velocità, l'azionamento ad alta potenza ed altre occasioni, sistema motorio di servo di AC/branch è usata come l'azionamento; nei requisiti di dinamica bassa, dell'operazione a bassa velocità, dell'azionamento a bassa potenza e di altre occasioni, il sistema motorio passo passo può essere utilizzato come l'azionamento; La dinamica molto alta, l'operazione ad alta velocità, l'alta precisione di posizionamento ed altre occasioni useranno il servo azionamento lineare.
Il controllo coordinato cartesiano del robot per realizzare la funzione flessibile e varia del robot di moto e la funzione di elaborazione rapida di risposta, il robot deve avere un sistema cervello controllo.
La funzione del sistema di controllo è di pubblicare le istruzioni di moto, dati trattati, determina il moto, ecc. Può pubblicare le istruzioni di controllo, ricevere i segnali di ritorno e determina le informazioni di elaborazione in qualunque momento secondo il programma numerato.
Secondo il posto di lavoro, il sistema di controllo può prendere molte forme differenti:
1. Combinazione di IPC e di scheda di controllo di moto: La scheda di controllo di moto prende in prestito le risorse del computer ed usa la sua propria funzione di controllo di moto per raggiungere il controllo.
2, scheda di controllo offline di moto: Prenda in prestito il computer per fare il programma, può immagazzinare il programma stesso, funzionamento fuori linea.
3, SpA - prenda in prestito un computer per compilare un programma, il programma può essere immagazzinato, funzionamento fuori linea.
4, regolatore dedicato.
Con quello gentile del sistema di controllo, il tecnico di controllo di moto sceglierà secondo la situazione reale secondo la situazione dello sport e gli stati di uso.
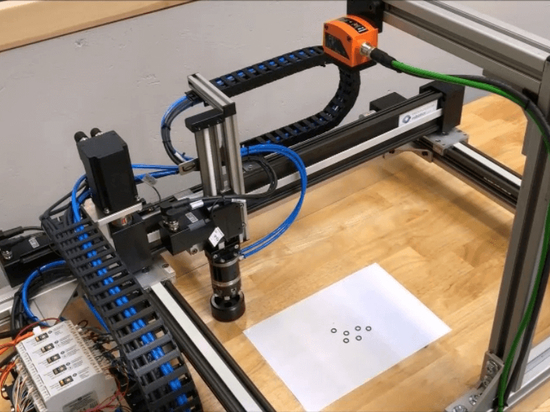
Apparecchiatura terminale cartesiana del robot - le coordinate cartesiane di funzionamento degli strumenti l'apparecchiatura terminale del robot dovrebbero usare differente, possono essere fornite di vari strumenti di funzionamento:
Per esempio, uno strumento terminale dell'operazione del robot per saldatura è un cannello per saldare: uno strumento terminale di trasporto con palette dell'operazione del robot è una pinza di presa; uno strumento terminale dell'operazione del robot della colla (dispensare) è una pistola di colla, uno strumento terminale dell'operazione del robot di rilevazione (monitoraggio) è una macchina fotografica o un laser.
Alcune mansioni lavoro-intensive non possono essere completate con un singolo strumento di funzionamento. È necessario da installare strumenti due o di funzionamenti. Per esempio, oltre all'esigenza di una pinza di presa meccanica, una macchina fotografica inoltre è richiesta per il bloccaggio di un oggetto commovente non stazionario, che segue costantemente la posizione spaziale dell'oggetto calcolato.