Vedi traduzione automatica
Questa è una traduzione automatica. Per vedere il testo originale in inglese cliccare qui
#Tendenze
che cosa rende ad un robot un robot cartesiano?
Rispetto ad un altro tipo di robot o di sistema multiasse.
In primo luogo, un sistema cartesiano è uno che si muove in tre, asce ortogonali — X, Y e Z — secondo le coordinate cartesiane. (Sebbene dovrebbe essere notato che un'asse di rotazione — sotto forma di estremità - effettore o estremità della lavorazione con utensili del braccio — a volte è incluso sull'asse esterno di un robot cartesiano.)
Che cosa fa un robot cartesiano un robot è che le asce realizzano il moto coordinato, attraverso un regolatore comune di moto.
Le asce di un robot cartesiano sono fatte da certa forma di azionatore lineare — o acquistato come un sistema premontato da un produttore o su misura dall'OEM o utilizzatore finale dalla guida e dagli elementi motori lineari.
Semplice, giusto?
La norma di 8373:2012 di iso definisce un robot industriale come:
Automaticamente un controllato, riprogrammabile, manipolatore multiuso programmabile in tre o più asce, che possono essere neanche fisse sul posto o cellulare per uso nelle applicazioni di automazione industriale.
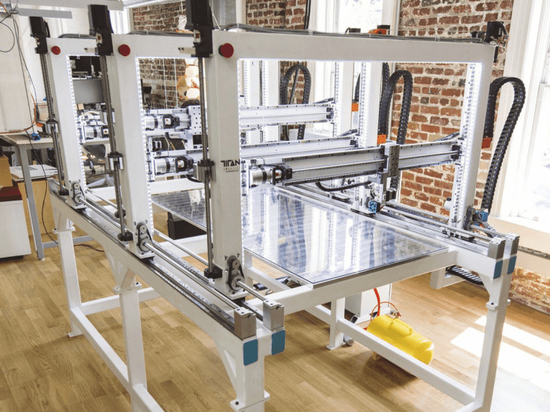
Ma non ogni sistema lineare che funziona nel DI X-Y, o le asce di X-Y-Z è un robot cartesiano. Un'eccezione notevole è un tipo di robot che impiega due (x) asce basse parallelamente. Questa configurazione — 2X-Y o 2X-Y-Z, per esempio — entra il robot dalla categoria cartesiana e nella categoria di robot del cavalletto.
La differenza primaria fra il cavalletto ed i robot cartesiani è che un robot cartesiano utilizza un azionatore lineare su ogni asse, mentre un robot del cavalletto è costruito sempre con due (x) asce basse, con il secondo (y) asse che le misura. Questa configurazione impedisce il secondo asse essere cantilevered (più su quello sotto) e che permette che i cavalletti abbiano lunghezze di molto colpo più lunghe — ed in molti casi, più grandi carichi utili — che i robot cartesiani.
Il secondo tipo di sistema lineare multiasse che non rientra nella definizione del robot cartesiano è la tavola DI X-Y. La differenza fra i robot cartesiani e le tavole DI X-Y si trova nel montaggio e nella disposizione di carico. In un robot cartesiano, nel secondo o nel terzo (Y o Z) l'asse è cantilevered, essendo sostenendo a soltanto un'estremità dall'asse sotto. Inoltre, il carico sull'asse esterno è generalmente cantilevered da quell'asse.
Questa disposizione crea non solo un carico di momento sull'asse esterno, dovuto il carico applicato, ma anche un carico significativo di momento sull'asse sostenente, dovuto l'effetto combinato del carico applicato con l'asse esterno. Il montaggio e la disposizione di carico limita la capacità ditrasporto dei robot cartesiani ed è un fattore primario nella determinazione della lunghezza di colpo massima per l'asse (cantilevered) esterno.
Al contrario, le tavole DI X-Y consistono di due asce concentrate sopra a vicenda, spesso con le simili lunghezze di colpo. Inoltre, il carico è concentrato generalmente sull'asse y. Questi configurazione e carico di asse che posizionano i risultati nel caricamento cantilevered pochissimo su qualsiasi asse (e spesso in nessun caricamento cantilevered sull'asse y).
I robot cartesiani sovrappongono SCARA e 6 robot di asse (articolato) in alcune caratteristiche tecniche e possono applicarsi in alcune delle stesse applicazioni, ma i robot cartesiani hanno parecchi benefici sopra SCARA e 6 tipi di asse. In primo luogo, le progettazioni cartesiane forniscono una busta rettangolare del lavoro in cui una percentuale significativa dell'orma del robot è utilizzata come area di lavoro attiva. SCARA e 6 tipi di asse, d'altra parte, hanno circolare o buste ovali del lavoro che provocano spesso molto spazio (inutilizzato) morto, particolarmente quando il viaggio richiesto, o la portata, è molto lunghi.
I robot cartesiani possono essere costruiti da virtualmente qualunque tipo di azionatore lineare con tutta la varietà di meccanismi di trascinamento — cinghia, palla o madrevite, azionatore pneumatico, o motore lineare. (Noti che gli azionamenti della cremagliera sono inoltre possibili, ma più comunemente sono utilizzati nei sistemi del cavalletto con i colpi molto lunghi.) Ciò significa che possono e spesso fanno, hanno la migliori precisione di posizionamento e ripetibilità che SCARA e 6 tipi di asse. I robot cartesiani inoltre presentano un vantaggio di uso facile in termini di programmazione perché la loro cinematica è più semplice (tre asce cartesiane, piuttosto che le asce rotazionali multiple).
Nel passato recente, i robot cartesiani premontati erano rari, con la maggior parte delle unità che sono su misura da un OEM, da un integratore del robot, o persino dall'utilizzatore finale. Ma ora, molti produttori dell'azionatore lineare inoltre forniscono ai sistemi cartesiani pre-configurati e premontati, le opzioni innumerevoli per misura il viaggio comune, il carico utile, la velocità ed i requisiti di precisione. Ed i produttori di 6 tradizionali asse e robot Scara stanno ottenendo dentro sull'azione pure, riconoscendo quello per i molti automazione industriale e le applicazioni dell'assemblea, robot cartesiani offrono un migliore rapporto tra la capacità di carico e l'orma che SCARA e 6 progettazioni di asse.