Vedi traduzione automatica
Questa è una traduzione automatica. Per vedere il testo originale in inglese cliccare qui
#News
{{{sourceTextContent.title}}}
Che cos'è la mappatura mobile?
{{{sourceTextContent.subTitle}}}
Una guida completa per i principianti
{{{sourceTextContent.description}}}
La mappatura mobile è uno degli usi più interessanti della tecnologia di localizzazione, in particolare della tecnologia GNSS/INS come la nostra. Questo blog è stato progettato per essere il primo passo verso la mappatura mobile per chiunque voglia saperne di più sulla tecnologia di mappatura mobile e sui sistemi di mappatura come il LiDAR mobile. Che cos'è la mappatura mobile?
Che cos'è la mappatura mobile?
Qualsiasi attività che comporti il rilievo di qualcosa da un veicolo in movimento è un tipo di mappatura mobile. In linea di massima, la mappatura mobile si suddivide in attività di mappatura terrestre e aerea. La mappatura mobile terrestre, talvolta chiamata anche mappatura mobile stradale, è quella in cui il rilievo viene effettuato da un'automobile. Le auto di Google Streetview sono probabilmente uno degli esempi più pubblici di mappatura mobile su strada.
La mappatura aerea, ovviamente, è il rilievo effettuato dall'alto. Può essere effettuata da un piccolo drone quad-copter o da un aereo più grande, con o senza equipaggio.
Tecnologia chiave per la mappatura mobile
In qualsiasi carico utile per la mappatura mobile (che è il nome dell'insieme di sensori e tecnologie utilizzati per il rilievo), ci sono alcuni componenti comuni:
1. I sensori utilizzati per raccogliere i dati del rilievo
2. La soluzione di localizzazione
Il processo di combinazione di questi due set di dati è noto come georeferenziazione. Una volta georeferenziati, i dati di rilevamento ricevono una posizione fissa sulla terra, il che significa che i dati possono essere utilizzati per lo scopo previsto.
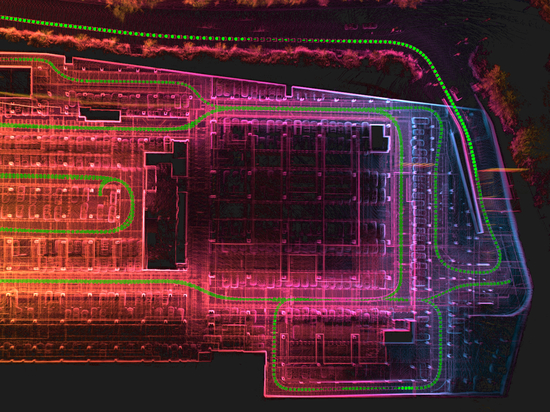
Per il rilievo è possibile utilizzare un'ampia gamma di sensori. Il più comune, storicamente, è la fotocamera, che crea un'immagine fotografica come risultato del rilievo. Più recentemente, il LiDAR (Light Detection And Ranging) è diventato un metodo di rilevamento molto diffuso. Il LiDAR utilizza i laser per misurare la distanza tra il sensore e gli oggetti nell'ambiente circostante, producendo milioni (o addirittura miliardi) di "punti" che costituiscono il rilievo. Il risultato finale di un LiDAR è noto come nuvola di punti, che assomiglia a un modello 3D dell'area rilevata.
A parte questo, quasi tutti i sensori possono essere utilizzati per i rilievi. Spesso vengono utilizzati il radar e l'imaging iperspettrale, ma in passato abbiamo collaborato con i clienti per aiutarli a georeferenziare i dati provenienti da una serie di sensori diversi, comprese le apparecchiature di rilevamento del gas. Se potete georeferenziare i dati con la vostra tecnologia di localizzazione, potete utilizzare il vostro sensore in un rilievo.
Localizzazione di mappe mobili
Oggi il metodo di localizzazione più diffuso per la mappatura mobile è una combinazione di dati GNSS e IMU (unità di misura inerziale).
GNSS sta per Global Navigation Satellite System e si riferisce a costellazioni di satelliti nello spazio che forniscono dati sulla posizione. Il GPS, ad esempio, è un esempio di GNSS.
Per saperne di più sul GNSS
Un IMU è un insieme di giroscopi e accelerometri che misurano le variazioni di velocità, accelerazione e momento angolare, utilizzati per stimare la direzione, la velocità e l'orientamento (tra le altre cose) di un oggetto. Un'IMU combinata con i dati GNSS viene solitamente definita un sistema di navigazione inerziale assistito da GNSS, o GNSS/INS. La combinazione dei due sistemi rende il sistema più robusto: l'INS consente di identificare eventuali errori nei dati satellitari, magari causati da un calo della copertura satellitare, mentre il GNSS corregge la deriva graduale della posizione a cui è soggetta qualsiasi IMU.
Come funziona la mappatura mobile
In genere, il processo di mappatura mobile prevede le seguenti fasi:
1. Impostazione: costruire il carico utile per il rilievo, assicurandosi che i sensori siano strettamente integrati per fornire la migliore qualità di output.
2. Raccolta dei dati: condurre il rilievo, sia a terra che in volo, raccogliendo sia i dati del rilievo che quelli della localizzazione in tempo reale.
3. Elaborazione: una volta raccolti i dati, è necessario combinare i due insiemi di dati per produrre un risultato finale. Ci sono alcune fasi secondarie: probabilmente si eseguiranno alcuni algoritmi di post-elaborazione sui dati di localizzazione per massimizzarne l'accuratezza, e poi si eseguirà una fase separata di georeferenziazione in cui i dati di posizione vengono combinati con i dati di rilevamento.
Le specifiche del flusso di lavoro variano a seconda del sensore utilizzato. Ad esempio, se si utilizza un dispositivo LiDAR mobile, è necessario aggiungere una fase di calibrazione dell'angolo morto prima del rilievo per allineare con precisione lo scanner LiDAR e il GNSS/INS, per evitare immagini sfocate.