Vedi traduzione automatica
Questa è una traduzione automatica. Per vedere il testo originale in inglese cliccare qui
#News
Evitare la risonanza con i motori passo-passo
I motori passo-passo sono motori elettrici senza spazzole, di solito con un alto numero di poli.
Sono tipicamente usati come una soluzione di posizionamento facile ed economica, poiché possono essere pilotati passo dopo passo senza bisogno di un sistema di feedback della posizione del rotore (come un encoder o un sensore di Hall integrato). Questo modo di pilotare un motore senza feedback è chiamato anche controllo "ad anello aperto". Tuttavia, il design di questi motori e il modo in cui sono guidati può portare a problemi in certe condizioni. In questo articolo, esamineremo diversi modi per evitare questi problemi e assicurare un movimento corretto.
GENERALITÀ SUI MOTORI PASSO-PASSO
Le fasi dei motori passo-passo sono commutate in modo sequenziale da un driver elettronico esterno che successivamente muoverà il rotore (tipicamente con un magnete permanente) da una posizione stabile a quella successiva. Il motore scelto deve offrire una coppia sufficiente per spostare il rotore e il carico alla fase successiva dopo ogni commutazione. Se la coppia non è sufficiente o se la velocità è troppo alta, c'è il rischio di perdere il sincronismo tra il driver e la posizione reale del rotore. Questo può causare una perdita di passi, possibili cambi di direzione della rotazione e un movimento erratico generale.
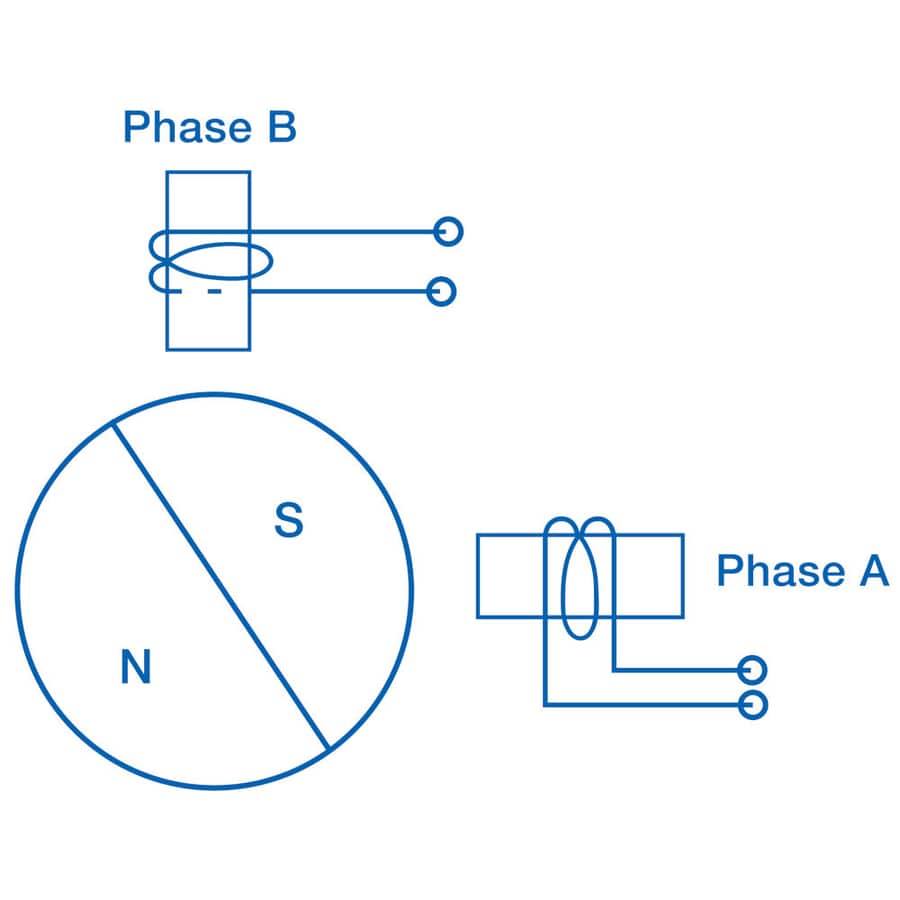
La figura 1 mostra il concetto di un motore passo-passo bifase molto semplice con una coppia di poli. La sequenza di commutazione guidata elettronicamente (A, B, -A, -B) creerà un giro completo del rotore su quattro passi (90° per passo).
OSCILLAZIONE INTORNO ALLA POSIZIONE STABILE
Ad ogni passo, il rotore tende ad allineare i suoi poli con quelli dello statore. Finché una fase è eccitata continuamente (senza passare alla fase successiva), il rotore mantiene una posizione stabile.
La figura 2 mostra che se il rotore si sposta in avanti rispetto alla posizione di destinazione, il motore svilupperà una coppia negativa che tenderà a tirare il rotore indietro verso la posizione di destinazione. D'altra parte, quando il rotore è prima della posizione di destinazione (lato sinistro), una coppia positiva spingerà il rotore in avanti nella direzione della posizione di destinazione. In queste condizioni, sembra che un fenomeno di oscillazione possa facilmente verificarsi, poiché l'inerzia del rotore (compresa l'inerzia del carico, se presente) impedirà al rotore di fermarsi esattamente sulla posizione stabile. Ogni volta che il rotore si sposta da una posizione stabile alla posizione stabile successiva (un passo avanti), la posizione angolare di solito supererà la posizione di destinazione del rotore a causa della sua energia cinetica mentre si avvicina. Inizierà poi ad oscillare intorno alla posizione non appena la coppia negativa richiamerà il rotore verso la posizione di destinazione. La frequenza naturale di questa oscillazione periodica può essere calcolata come segue:
Tuttavia, questa oscillazione si ridurrà in ampiezza nel tempo, grazie alle perdite del sistema. Questa riduzione di ampiezza è di solito chiamata "smorzamento" e dipende da diversi fattori. Alla fine lo smorzamento porterà sempre il rotore in una posizione immobile se solo una fase è eccitata, ma in alcuni casi, ha senso ottimizzare lo smorzamento quando le fasi sono eccitate in sequenza (commutazione).
Ad alta velocità, il periodo di commutazione diventa più breve, e se l'oscillazione non è finita prima che la fase successiva sia comandata c'è il rischio di risonanza (la tendenza del sistema meccanico a rispondere con un'ampiezza maggiore). Questo accadrà probabilmente se la frequenza di commutazione è vicina alla frequenza naturale del sistema, come si vede nella figura 3.
La risonanza può portare a un funzionamento erratico del motore, perdendo passi e cambiando il senso di rotazione in modo casuale. Pertanto, è importante prendere misure preventive per evitare qualsiasi risonanza per garantire un adeguato sincronismo tra il comando e la posizione reale del rotore.
MODI PER EVITARE LA RISONANZA
Evitare la frequenza naturale
La risonanza si verifica tipicamente quando la frequenza di commutazione è vicina alla frequenza naturale di vibrazione del sistema meccanico. Di conseguenza, il modo più basilare per prevenire il verificarsi della risonanza è quello di mantenere la frequenza di commutazione lontana dalla frequenza naturale del sistema utilizzando i parametri descritti. Tuttavia cambiare la frequenza di commutazione non è sempre possibile, perché a volte richiede altri cambiamenti per compensare il cambiamento di velocità.
Spostamento della frequenza naturale
Invece di cambiare la frequenza di commutazione, è meglio spostare la frequenza naturale a una frequenza più alta o più bassa per evitare che la frequenza di commutazione corrisponda. Questo è tipicamente fatto lavorando sui due parametri che influenzano la frequenza naturale: la coppia di mantenimento e l'inerzia totale del sistema.
- Coppia di mantenimento
Di solito, un motore è dimensionato per essere usato alla sua corrente nominale che definisce la coppia di mantenimento. L'uso di una corrente più alta (per aumentare la coppia di mantenimento) non è possibile per un funzionamento continuo, poiché le perdite di joule più elevate provocherebbero una temperatura eccessiva della bobina. Tuttavia, è possibile utilizzare una corrente inferiore (per ottenere una coppia di mantenimento inferiore e spostare la frequenza naturale verso il basso) se la coppia inferiore è sufficiente per le esigenze dell'applicazione.
- Inerzia
Il momento d'inerzia del sistema meccanico è la somma dell'inerzia del rotore del motore più l'inerzia del carico. Lo sviluppatore del motore può cambiare l'inerzia del rotore implementando modifiche al design. La frequenza di risonanza naturale di un motore senza carico è generalmente fornita nelle specifiche del motore. Altrimenti, l'utente può lavorare sull'inerzia del carico (completamente indipendente dal motore). L'aumento dell'inerzia sposterà la frequenza naturale del sistema complessivo verso il basso, e viceversa. Cambiare l'inerzia del sistema può anche influenzare le prestazioni del motore nell'applicazione e dovrebbe essere confermato con il fornitore del motore per garantire un funzionamento corretto.
Prevenire la risonanza con il microstepping
Più alta è l'energia portata nel sistema meccanico, più alto è il rischio di innescare un fenomeno di risonanza. Per prevenire questo, il microstepping può essere una buona soluzione invece di guidare un motore passo-passo con passi completi. Ogni micropasso (mezzo passo, ¼ di passo, ecc.) ha un angolo di passo più piccolo e richiede meno energia per passare da una posizione stabile a quella successiva. L'overshoot della posizione di destinazione è minore e così pure l'ampiezza dell'oscillazione, che è spesso un modo efficace per evitare la risonanza.
Inoltre, il microstepping offre generalmente un minor rumore, meno vibrazioni e un funzionamento più fluido. I motori passo-passo sono spesso guidati in micropassi.
Prevenire la risonanza con lo smorzamento
Ci sono vari tipi di fattori di smorzamento:
- Attrito del carico e attrito del cuscinetto del motore
L'attrito fornisce una coppia di rottura (opposta alla direzione istantanea di rotazione) che è costante, indipendentemente dalla velocità del motore. Mentre aiuta a smorzare l'oscillazione e previene la risonanza, si dovrebbe tenere a mente che l'attrito si aggiunge anche al carico applicato al motore a qualsiasi velocità. Quindi, è importante assicurarsi che le prestazioni del motore siano sufficienti quando si aggiunge l'attrito per prevenire la risonanza.
- Attrito viscoso
L'attrito viscoso fornisce anche una coppia di rottura, ma la sua grandezza dipende dalla velocità del motore. Più alta è la velocità, più forte è lo smorzamento viscoso. Questo è di solito il modo preferito di smorzare un movimento oscillatorio. Fornisce un forte smorzamento quando l'ampiezza dell'oscillazione è grande (velocità più alta all'inizio) e solo un smorzamento molto leggero quando l'oscillazione è più piccola (a differenza dell'attrito secco che fornisce la stessa grandezza di smorzamento anche a velocità molto basse). Di conseguenza, l'attrito viscoso è un buon modo per smorzare l'oscillazione in un tempo molto breve, e senza aggiungere troppo carico al motore.
Ci sono diversi fenomeni che possono portare l'attrito viscoso in un sistema:
"Correnti parassite generate nel ferro dello statore (perdite nel ferro), che agiscono come una coppia frenante. Queste perdite sono maggiori quando la velocità è più alta, e non esistono in assenza di movimento, quindi possono essere considerate come attrito viscoso. A seconda del design e della tecnologia del motore, le perdite di ferro possono essere diverse da un motore all'altro. I motori a magneti a disco hanno di solito perdite di ferro limitate che permettono loro di raggiungere velocità relativamente alte. Pertanto, non si dovrebbe fare affidamento solo sulle perdite di ferro per smorzare l'oscillazione di un motore a magnete a disco e si potrebbe voler considerare un altro modo per prevenire la risonanza con un tale motore.
"Il back-EMF (tensione) indotto nella bobina, con conseguente corrente e una coppia di rottura che smorzerà l'oscillazione. Questa corrente è tipicamente consentita quando la fase non eccitata è in cortocircuito, e poiché è proporzionale alla velocità del motore (più alta è la velocità, più forte è la coppia di rottura), può anche essere considerata come un attrito viscoso. I driver chopper (a corrente costante) in genere non permettono questo tipo di smorzamento, poiché la corrente è mantenuta costante nonostante le variazioni del Back-EMF.
"Le soluzioni di smorzamento elettronico possono essere applicate pilotando il motore in un modo particolare senza cambiare alcun parametro meccanico nel sistema.
"Uno smorzatore meccanico esterno può anche essere aggiunto nell'applicazione o sul motore per assorbire una parte dell'energia di vibrazione tramite attrito viscoso per evitare la risonanza.
CONCLUSIONE
Il funzionamento sequenziale, passo dopo passo, dei motori passo-passo può portare a problemi di risonanza ogni volta che le condizioni favorevoli alla risonanza si verificano contemporaneamente. A volte, agire su una sola di queste condizioni può essere sufficiente per eliminare la risonanza. Si dovrebbe anche tenere a mente che, a seconda della tecnologia e del design del motore, ci possono essere ulteriori intervalli di frequenza che possono innescare la risonanza, oltre alla frequenza di oscillazione naturale. Tra questi c'è, per esempio, la risonanza a media frequenza. I fornitori di motori possono aiutarvi a determinare quali gamme di frequenza possono innescare una risonanza e come prevenirla.