Questa è una traduzione automatica. Per vedere il testo originale in inglese
cliccare qui
#Tendenze
{{{sourceTextContent.title}}}
Qual è la differenza tra la cinematica seriale e la cinematica parallela nel motion design multiasse?
{{{sourceTextContent.subTitle}}}
Stiamo risolvendo il problema del posizionamento.
{{{sourceTextContent.description}}}
Le tabelle e gli stadi di posizionamento odierni includono hardware e software più che mai personalizzati per soddisfare specifiche esigenze di output. Questo è fatto per progetti di movimento che si muovono con precisione attraverso comandi multiasse anche complessi.
Il feedback di precisione è la chiave di tale funzionalità - spesso sotto forma di encoder ottici o magnetici (alimentati dall'elettronica) per la risoluzione e la ripetibilità su scala nanometrica .... anche per lunghi viaggi.
Infatti, la progettazione di stadi in miniatura sta stimolando la maggior parte dell'innovazione degli algoritmi di feedback e di controllo per spostare anche carichi molto grandi con una precisione inferiore al micron.
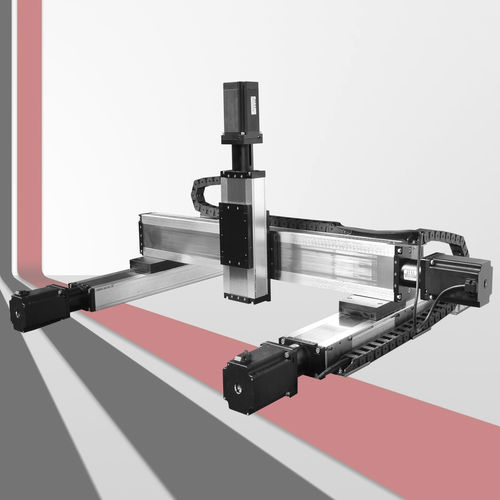
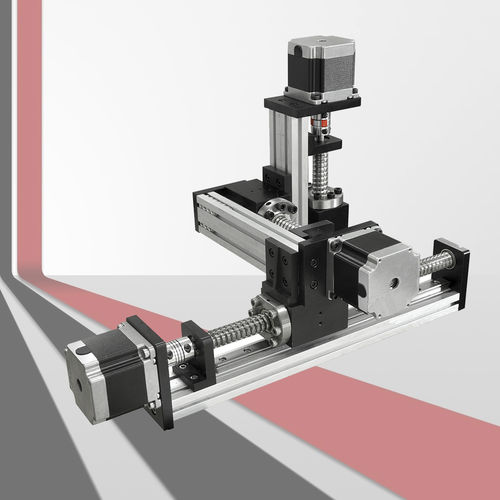
Prima di tutto un po' di retroscena: L'uso di stadi pre-ingegnerizzati e robot cartesiani continua a crescere con prototipazione rapida, applicazioni di ricerca automatizzate e pressioni di time-to-market più strette. Questo è particolarmente vero per la fotonica, i dispositivi medici, la ricerca e lo sviluppo e la produzione di semiconduttori. In passato, la costruzione di movimenti multiasse per automatizzare o altrimenti migliorare i compiti, costringeva i progettisti a creare e combinare gli stadi lineari in combinazioni X-Y-Y-Z ..... all'interno dell'azienda.
Qualsiasi altro grado di libertà richiedeva l'aggiunta di goniometri, stadi rotanti e altri end effectors.
Chiamata cinematica seriale, tale macchina costruisce a volte si traduce in configurazioni ingombranti con errori accumulati a causa di stackup di tolleranza. In alcuni casi, i cuscinetti limitano tali gruppi ad un centro di rotazione.
Questi non sono temi quando il design soddisfa i suoi requisiti di movimento .... ma i design di movimento in miniatura, in particolare, non sono così indulgenti nei confronti di tali fattori.
In contrasto con le piattaforme esapode o Stewart - forme di attuatori cinematici paralleli per il movimento. Almeno per gli assiemi di movimento multiasse miniaturizzati, queste prestazioni superano le prestazioni della cinematica seriale. Questo in parte perché il movimento di uscita dell'esapode non è limitato dai valori nominali dei cuscinetti (lineari e rotativi).
Al contrario, i controlli di movimento eseguono gli algoritmi in un punto di rotazione (centro di rotazione) definito dall'applicazione, libero dall'accumulo di errori. Minore numero di componenti, minore inerzia e maggiore rigidità sono altri vantaggi.