Vedi traduzione automatica
Questa è una traduzione automatica. Per vedere il testo originale in inglese cliccare qui
#Tendenze
{{{sourceTextContent.title}}}
Cinque passi verso l'integrazione del motore lineare
{{{sourceTextContent.subTitle}}}
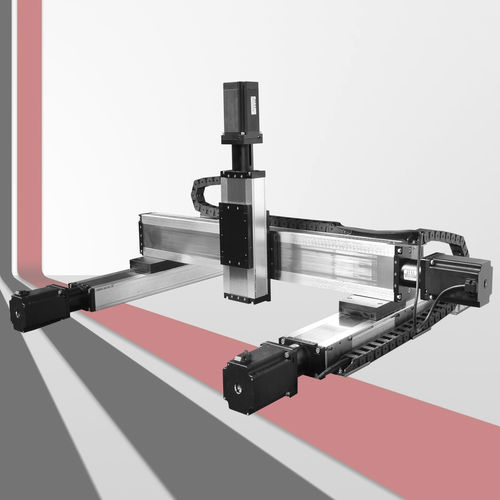
Configurazione tipica della progettazione del sistema di movimento
{{{sourceTextContent.description}}}
Il movimento lineare è fondamentale per molte macchine in movimento e la natura di azionamento diretto dei motori lineari può semplificare la progettazione complessiva della macchina in queste applicazioni. Altri vantaggi includono una migliore rigidità, perché i motori lineari sono fissati direttamente al carico.
L'integrazione di questi motori (e dei componenti periferici di cui necessitano) può sembrare scoraggiante, ma il processo può essere suddiviso in cinque semplici passaggi. Seguendo questo processo passo dopo passo, i costruttori di macchine e robot possono trarre vantaggi dai motori lineari senza sforzi o complessità estranee.
1. Determinare il tipo di motore: Nucleo di ferro contro quello senza ferro
Il primo passo è quello di selezionare il motore lineare tra i tipi disponibili.
Motori con nucleo in ferro: I motori con nucleo in ferro sono i più comuni e sono adatti per applicazioni di automazione generale. Il nucleo in ferro si riferisce alla costruzione della bobina di questo motore, che consiste di laminazioni del nucleo in ferro. Una configurazione tipica è costituita da una traccia magnetica fissa su un solo lato e da una bobina mobile del motore o forcella. Il nucleo di ferro massimizza la forza di spinta generata e crea una forza di attrazione magnetica tra la bobina e i magneti.
Questa forza di attrazione magnetica può essere utilizzata per aumentare efficacemente la rigidità della guida lineare precaricando i cuscinetti per movimenti lineari. Il precarico magnetico può anche aumentare la risposta in frequenza del sistema migliorando la decelerazione e l'assestamento.
D'altra parte, la forza di attrazione deve essere adeguatamente sostenuta da una maggiore capacità di carico da parte degli elementi di supporto e delle guide lineari. Questo potrebbe degradare la libertà di progettazione meccanica della macchina.
Una seconda configurazione a motore lineare con nucleo in ferro è costituita da una coppia di binari magnetici stazionari posti su entrambi i lati della bobina mobile. Questa costruzione brevettata annulla gli effetti dell'attrazione magnetica, fornendo al contempo la massima forza per ogni sezione trasversale. Il design bilanciato riduce il carico del cuscinetto, consentendo l'uso di cuscinetti a movimento lineare più piccoli e diminuendo il rumore del cuscinetto.
Motionsystemdesign Com Motors Drives 0111 VantaggiMotori senza ferro: Esistono anche motori lineari senza ferro; questi motori non hanno ferro nelle loro bobine, quindi non c'è attrazione tra le parti del motore.
Il tipo più comune senza ferro è il canale a U: Due tracce magnetiche sono unite per formare un canale in cui si muove la bobina del motore (o forzante). Questo motore è ideale per applicazioni che richiedono ondulazioni a bassa velocità ed elevate accelerazioni. La forza di trazione zero e la natura zero-cogging della costruzione senza ferro minimizza l'ondulazione della coppia; l'accelerazione è aumentata perché la bobina è relativamente leggera.
Una seconda configurazione senza ferro si presenta sotto forma di cilindro. I magneti sono impilati all'interno di un tubo di acciaio inossidabile e la bobina del motore si muove intorno al cilindro. Questa configurazione è adatta quando si sostituiscono le viti a sfera, in quanto produce velocità e precisione di posizionamento molto più elevate all'inviluppo più o meno nello stesso involucro.
Dimensionamento della bobina e lunghezza del binario
Indipendentemente dalla configurazione, tutte le bobine dei motori lineari devono essere dimensionate in base ai requisiti dell'applicazione: carico applicato, profilo di spostamento dell'obiettivo, ciclo di lavoro, accuratezza, precisione, durata e ambiente operativo. Suggerimento: Richiedere l'assistenza tecnica dei produttori di motori lineari e il software di dimensionamento (spesso gratuito) per selezionare il tipo e la taglia di motore migliore per una particolare applicazione.
Le sezioni dei binari magnetici sono offerte in diverse lunghezze e possono essere impilate da un capo all'altro per raggiungere la lunghezza di corsa desiderata, con una lunghezza totale del magnete praticamente illimitata. Per semplificare la progettazione e ridurre i costi, è meglio utilizzare le sezioni di binari magnetici più lunghe disponibili presso il produttore.
2. Decidere un encoder
Il secondo passo nella progettazione di un sistema di motori lineari è la selezione dell'encoder lineare. I più comuni sono gli encoder lineari incrementali con sensori di lettura ottici o magnetici. Selezionare un encoder con la risoluzione e la precisione richieste per l'applicazione e uno adatto all'ambiente macchina.
La retroazione dell'encoder è tipicamente inviata al servo amplificatore tramite un treno di impulsi analogico sinusoidale o digitale. Un'altra opzione è il feedback dell'encoder seriale ad alta velocità - che fornisce una maggiore velocità di trasmissione dei dati, una maggiore risoluzione dei bit, una maggiore immunità ai disturbi, una maggiore lunghezza dei cavi e informazioni complete sugli allarmi.
Le comunicazioni seriali si collegano in due modi.
La comunicazione diretta tra l'amplificatore e l'encoder è possibile con encoder con protocollo encoder seriale compatibile con l'amplificatore.
Se un encoder non ha un'uscita seriale (o se il protocollo di uscita seriale è incompatibile con l'amplificatore) si può utilizzare un modulo convertitore seriale. In questo caso, il modulo accetta un segnale analogico dall'encoder insieme al segnale del sensore di Hall, suddivide il segnale analogico e trasmette i dati di questo segnale in serie al servo amplificatore. I dati del sensore di Hall vengono utilizzati all'accensione e per verificare il feedback dell'encoder.
Diversi produttori di encoder lineari offrono ora encoder lineari assoluti che supportano una varietà di protocolli di comunicazione seriale, compresi i protocolli proprietari di produttori di amplificatori di terze parti.
3. Scegliere l'amplificatore
Il terzo passo del processo di progettazione è la selezione del servo amplificatore. L'amplificatore deve essere correttamente dimensionato in base al motore.
Il Plug and play è una caratteristica che può essere offerta solo da fornitori che producono sia servomotori che amplificatori. Alcuni fornitori forniscono plug and play per ridurre i tempi di avvio e garantire una corretta configurazione.
Alcuni servoamplificatori sono dotati di riconoscimento automatico del motore e di una modalità senza sintonizzazione, che elimina la necessità di sintonizzare il sistema servo. Con questo software, le specifiche del motore (incluse le caratteristiche di sovraccarico) vengono automaticamente caricate sul servoamplificatore dal motore all'accensione. Questo elimina il potenziale errore dell'utente quando si inseriscono le specifiche del motore, eliminando virtualmente il rischio di runaways del motore e di errori di fase.
4. Selezionare gli elementi di supporto e i cuscinetti
Le due fasi finali di progettazione vanno di pari passo per completare la progettazione del sistema di motori lineari: Il quarto passo è quello di selezionare un sistema di cuscinetti a movimento lineare, e il quinto è quello di progettare gli elementi di supporto.
Ci sono due importanti allineamenti nella maggior parte dei gruppi di motori lineari: la distanza tra motore e magnete tra la bobina e la traccia del magnete e la distanza tra la testa di lettura dell'encoder e la riga lineare. Quest'ultimo criterio viene eliminato quando si sceglie un sistema di misura lineare chiuso.
Suggerimenti
I cuscinetti per il movimento lineare dovrebbero fornire una precisione sufficiente a soddisfare le tolleranze del gap, mentre gli elementi di supporto dovrebbero essere progettati per spaziare adeguatamente i componenti e soddisfare i requisiti di parallelismo dei cuscinetti lineari e dell'encoder.
Una volta soddisfatti questi criteri, la scelta e la progettazione dei cuscinetti e degli elementi di supporto dipende in ultima analisi dai requisiti prestazionali della macchina. Le applicazioni che richiedono un'elevata accuratezza e precisione richiedono un encoder ad alta risoluzione e alta precisione, oltre a cuscinetti lineari ad alta precisione.
Nel dimensionare questi cuscinetti, tenere conto del carico utile e delle forze magnetiche attrattive associate ai motori lineari con nucleo in ferro. In molti casi, gli elementi di supporto delle guide lineari e delle piste magnetiche possono essere integrati nel telaio della macchina.