Vedi traduzione automatica
Questa è una traduzione automatica. Per vedere il testo originale in inglese cliccare qui
#Tendenze
{{{sourceTextContent.title}}}
Scenari di movimento: Applicazioni pick-and-place
{{{sourceTextContent.subTitle}}}
Progettare un'automazione completa per applicazioni pick-and-place ad alta velocità è uno dei compiti più impegnativi per gli ingegneri del movimento
{{{sourceTextContent.description}}}
Man mano che i sistemi robotici diventano più complessi e i tassi di produzione salgono sempre di più, i progettisti di sistemi devono stare al passo con le ultime tecnologie o rischiare di specificare un design meno che ottimale. Passiamo in rassegna alcune delle ultime tecnologie e componenti disponibili, oltre a dare un'occhiata da vicino a dove trovano impiego.
I bracci robotici si adattano a design compatti
I bracci robotici industriali non sono solitamente noti per essere leggeri. Piuttosto, la maggior parte ha costruzioni sostanziali che devono sostenere pesanti utensili all'estremità del braccio. Nonostante i vantaggi di un design robusto, questi bracci robotici sono troppo pesanti e ingombranti per applicazioni delicate. Per rendere i bracci più agili e adatti a compiti leggeri, gli ingegneri di igus Inc. che lavorano a Colonia, in Germania, hanno deciso di sviluppare un giunto multiasse per permettere ai piccoli carichi di ruotare intorno a un braccio. Il nuovo giunto è adatto per applicazioni delicate di pick-and-place in cui la forza di presa può essere regolata secondo necessità.
Flessibilità e leggerezza sono i parametri chiave del design del nuovo giunto, che consiste in plastica e comandi a cavo. In breve, i cavi sono mossi dall'articolazione della spalla del braccio da servomotori dc brushless compatti FAULHABER, il che evita l'inerzia nel braccio, facilita il movimento dinamico e riduce al minimo l'ingombro.
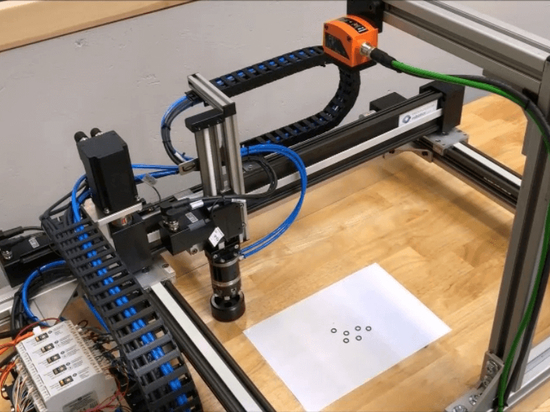
Gli ingegneri hanno basato gran parte del loro progetto sull'articolazione del gomito umano, quindi due DOF - rotazione e rotazione - sono combinati in un unico giunto. Simile a un braccio umano, la parte più debole del braccio del robot non sono le ossa (il tubo del corpo del braccio del robot) o i muscoli (il motore di azionamento), ma i tendini, che trasferiscono la potenza. Qui, i cavi di controllo ad alta tensione sono fatti di un materiale in polietilene UHMW-PE super-resistente con una resistenza alla trazione da 3.000 a 4.000 N/mm2. Oltre alle funzioni tradizionali del braccio del robot, come le applicazioni pick-and-place, il giunto è anche adatto per raccordi speciali di telecamere, sensori o altri strumenti dove è richiesta una costruzione leggera. Un sensore magnetico di posizione angolare è incorporato in ogni giunto per un'alta precisione.
I servomotori a commutazione elettronica sono caratterizzati da una bassa massa mobile adatta all'uso dinamico: La tensione di funzionamento di 24 Vdc è progettata per l'alimentazione a batteria, cruciale per l'uso in applicazioni mobili, mentre la coppia del motore di 97 mNm porta i riduttori planetari di diametro conforme ai valori richiesti per il funzionamento del braccio. Inoltre, questi azionamenti brushless non hanno componenti soggetti a usura oltre al cuscinetto del rotore, garantendo una durata di vita di decine di migliaia di ore.
Il sistema di movimento lineare accelera l'automazione di laboratorio
Oltre alle tradizionali operazioni di imballaggio e assemblaggio, il pick-and-place sta proliferando anche nell'automazione di laboratorio ad alta velocità. Immaginate di manipolare milioni di campioni di batteri ogni giorno e avrete un'idea di ciò che i laboratori biotecnologici di oggi devono gestire. In una configurazione, un sistema avanzato di movimento lineare sta permettendo a un robot da laboratorio biotecnologico chiamato RoToR di bloccare array di cellule a velocità da record di più di 200.000 campioni all'ora. RoToR proviene da Singer Instruments, Somerset, Regno Unito, ed è utilizzato come sistema di automazione da banco per la ricerca genetica, sul genoma e sul cancro. Uno di questi robot spesso serve diversi laboratori, con gli scienziati che riservano brevi intervalli di tempo per replicare, accoppiare, riarrangiare e fare il backup delle librerie di batteri e lieviti.
Un controller in tempo reale gestisce i tre assi di movimento che coordinano le mosse di pinning punto a punto del robot, così come un asse di manipolazione del campione, e si interfaccia anche con la GUI del robot. Inoltre, il controller gestisce anche tutti i canali I/O.
Oltre al controller, Baldor ha fornito anche un servomotore e un azionamento lineare e tre moduli integrati di motore e azionamento passo-passo. Il robot effettua trasferimenti punto a punto dalle piastre di origine a quelle di destinazione lungo un asse di servomotore lineare che corre lungo la larghezza della macchina. Questo asse supporta una testa di motore passo-passo a due assi che controlla l'azione di pinning. Infatti, il movimento combinato X-Y-Z può anche mescolare i campioni usando un complesso movimento elicoidale. L'asse separato del motore passo-passo controlla il meccanismo di caricamento delle teste di spillo. Pinze e rotatori pneumatici controllano altri movimenti della macchina, come il prelievo e lo smaltimento delle teste di spillo all'inizio e alla fine delle operazioni.
Singer originariamente intendeva usare un azionamento pneumatico per l'asse trasversale principale, ma questo progetto non poteva fornire la risoluzione di posizionamento o la velocità desiderata, ed era troppo rumoroso per un ambiente di laboratorio. È stato allora che gli ingegneri hanno iniziato a considerare i motori lineari. Baldor ha creato un servomotore lineare brushless personalizzato con modifiche meccaniche alla guida lineare, consentendole di essere supportata solo alle sue estremità, piuttosto che lungo la sua lunghezza - così la forcella del motore agisce come un gantry dell'asse X che porta gli assi Y e Z. Infine, il design del magnete del motore lineare riduce al minimo il cogging per consentire un movimento fluido.