Vedi traduzione automatica
Questa è una traduzione automatica. Per vedere il testo originale in inglese cliccare qui
#Tendenze
{{{sourceTextContent.title}}}
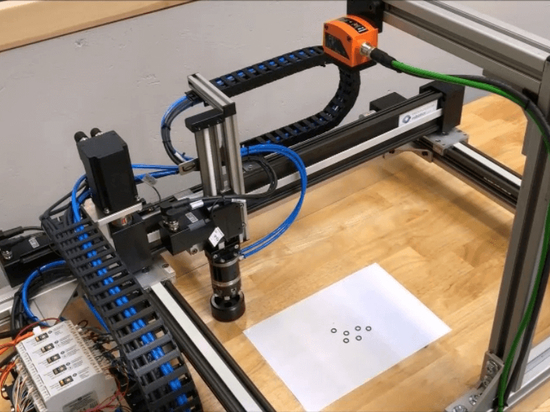
Sistemi a cavalletto: Lavorare fuori dagli schemi
{{{sourceTextContent.subTitle}}}
Fatto: i robot con design cartesiano di solito producono la migliore precisione.
{{{sourceTextContent.description}}}
Applicazione / Industria:
Imballaggio, produzione, pallettizzazione, pick and place, automazione.
La sfida:
Gli involucri di lavoro irregolari dei bracci articolati tradizionali possono richiedere una riprogettazione degli spazi di lavoro esistenti. I robot SCARA e a braccio articolato potrebbero essere la forma più riconoscibile di robot sul mercato oggi, ma si guarda ai robot a portale per fare i lavori più grandi nel minor spazio possibile. I robot a cavalletto chiamati anche robot cartesiani sono quasi onnipresenti nell'automazione, ma per ragioni che vanno oltre lo scopo di questo articolo non sono veloci da considerare come robot seri. Grazie al loro design semplice, al basso costo e alla scalabilità e alla miriade di soluzioni di motori e software di controllo, questo sta cambiando.
Vantaggi dei robot a cavalletto:
3+ assi di movimento di quasi qualsiasi lunghezza
Scalabile
Il riduttore e il motore possono essere dimensionati in base alla gamma di movimento e alle velocità
Adatto per carichi da leggeri a pesanti/pendenti
Flessibile ed efficiente grazie alla scalabilità degli assi lineari
Economico
Svantaggi dei robot a cavalletto:
Non può variare raggiungere o aggirare le ostruzioni
Le guide lineari non sono facilmente sigillate contro l'ambiente
Non indipendente: è necessario un supporto o un telaio o un altro tipo di montaggio
Vantaggi del sistema Gantry:
I robot Gantry possono utilizzare un'intera area di lavoro cubica del 96% del loro spazio e delle loro dimensioni. Un robot cartesiano ha tre assi. Come il loro omonimo e più riconoscibile cugino gigante, la gru a cavalletto, sono comunemente sospesi a una trave dell'asse X o X/Y su una struttura rigida. Le coordinate nei tre assi sono solitamente definite come X, Y e Z. Ogni asse è disposto ad angolo retto per permettere tre gradi di movimento. I gantry sono ulteriormente caratterizzati da un supporto alle due estremità o attraverso l'aggiunta di un secondo membro. A differenza dei robot a braccio, i gantry possono essere facilmente scalati a proporzioni maggiori in tutti e tre gli assi. I robot a cavalletto sono particolarmente adatti per applicazioni in cui i requisiti di orientamento aggiuntivi sono minimi o in cui i pezzi possono essere messi in scena prima che il robot li prenda.
Sia i robot cartesiani che quelli a portale hanno un involucro di lavoro rettangolare o cubico, al contrario dei robot articolati che, come le articolazioni in un braccio umano, hanno dei limiti per ogni movimento e uno specifico campo di movimento ad arco. Le loro specifiche sono mostrate come gradi di movimento con grandi archi con trame di gradi di movimento positivi e negativi che ruotano intorno al centro della sua base e al cuscinetto di ogni asse. È curioso notare che lo spazio di lavoro stesso spesso deve essere adattato a questi involucri di lavoro insoliti, al contrario del robot che si adatta allo spazio di lavoro.
A causa della loro struttura rigida e leggera, i robot cartesiani/gantry sono molto precisi e ripetibili. A causa della loro struttura semplice, i robot a portale sono intuitivi da programmare e facili da visualizzare quando si valuta una nuova automazione. La maggior parte di tutti i robot Gantry sono configurabili. Da una pletora di scelte di motori e riduttori a componenti e materiali, questi robot sono preparati ad affrontare le sfide di ambienti umidi, pericolosi e sporchi.
Il design relativamente semplice e il funzionamento diretto del robot a coordinate cartesiane lo rendono altamente desiderabile nella produzione. Poiché i singoli assi possono essere facilmente sostituiti, i tempi di inattività sono ridotti e i costi di manutenzione sono tenuti al minimo. Inoltre, l'intero sistema può essere smontato nelle sue parti componenti per essere utilizzato in applicazioni multiple ad asse singolo. Soprattutto, i sistemi di robot a coordinate cartesiane sono poco costosi rispetto ad altri robot più complessi.
Applicazioni Gantry:
I robot Gantry hanno tutti i loro assi situati sopra l'involucro di lavoro che li rende ideali per processi di lavoro sopraelevati. I robot Gantry possono essere utilizzati per tenere e posizionare una varietà di end-effector come quelli utilizzati in: Assemblaggio di schede PC, erogazione, spruzzatura, movimentazione di materiali, pallettizzazione, pick and place, getto d'acqua, saldatura a piastra, saldatura a frizione, assemblaggio, imballaggio, unitizzazione, ordinamento, scansione, carico/scarico di vassoi, posizionamento di telecamere. ispezione, taglio di vetro, stampa di plottaggio, taglio laser, coltelli volanti, fissaggio e avvitamento.
Si è detto che il gantry è il vero cavallo di battaglia dell'industria moderna. Pensateci... milioni di robot gantry sono stati impacchettati e venduti in macchine chiavi in mano come quelle usate per l'assemblaggio di componenti elettronici e sistemi robotici pick and place da soli. Ancora oggi, i gantry lineari X-Y-Z sono la colonna portante delle industrie di misurazione delle coordinate delle macchine utensili grazie alla loro precisione e rigidità. Questo tipo di robot è particolarmente adatto per le applicazioni in cui i requisiti di orientamento aggiuntivi sono minimi o in cui o i pezzi possono essere messi in scena prima che il robot li prenda.
Spesso trascurato, il robot a portale è il pilastro della moderna industria dell'automazione e dovrebbe sempre essere considerato per una nuova automazione grazie alla sua flessibilità, efficienza e facilità di implementazione.