#Tendenze
Perché il modulo articolare è chiamato il “cuore energetico” del robot
Le articolazioni dei robot sono tra i componenti fondamentali che costituiscono la struttura meccanica del robot.
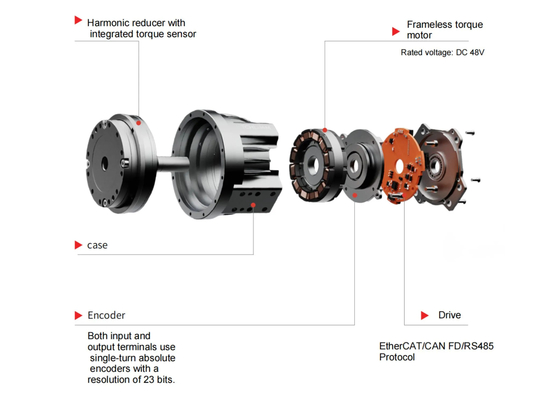
Composizione e funzione del modulo articolare
Encoder magnetoelettrico:
La parte principale è composta da una scheda di lettura e da una griglia magnetica. La griglia presenta piccoli poli magnetici incisi e il sensore rileva le variazioni del campo magnetico durante la rotazione del disco.
Il chip può essere un dispositivo ad effetto Hall (sensibile alle variazioni di tensione) o un dispositivo magnetoresistivo (sensibile ai cambiamenti del campo magnetico).
Il segnale viene moltiplicato, diviso o interpolato per ottenere l’uscita necessaria alla misurazione.
Encoder fotoelettrico:
È costituito da una sorgente luminosa, un disco ottico codificato e un elemento fotosensibile.
Il disco è inciso con linee trasparenti e opache. Il flusso luminoso ricevuto dall’elemento fotosensibile varia in sincronia con le linee trasparenti.
L’uscita diventa un segnale a impulsi, con un impulso per ogni rotazione.
Analizzando gli impulsi, si può misurare e controllare con precisione lo spostamento e la velocità attuale.
Encoder incrementale:
Utilizza il principio della conversione fotoelettrica e genera tre segnali a onda quadra: fasi A, B e Z.
La differenza di fase di 90° tra A e B consente di determinare la direzione di rotazione, mentre la fase Z (un impulso per giro) serve per il riferimento di posizione.
Vantaggi: struttura semplice, lunga durata meccanica, elevata affidabilità, resistenza alle interferenze, trasmissione a lunga distanza.
Svantaggio: non fornisce la posizione assoluta dell’albero.
Encoder assoluto:
È un sensore che fornisce direttamente dati digitali.
Il disco codificato contiene più tracce concentriche formate da settori trasparenti e opachi.
Il numero dei settori raddoppia a ogni traccia, e il numero di tracce corrisponde ai bit binari.
Una sorgente luminosa si trova da un lato, mentre elementi fotosensibili rilevano la luce dall’altro.
Ogni posizione genera un codice binario unico, senza bisogno di contatore.
Più tracce ci sono, maggiore è la precisione.
Azionamento in corrente continua e sensore di temperatura:
L’azionamento in CC regola la tensione del motore per controllare la velocità del motore brushless.
Il sensore di temperatura rileva il calore e lo converte in un segnale di uscita utile (feedback termico).