Vedi traduzione automatica
Questa è una traduzione automatica. Per vedere il testo originale in inglese cliccare qui
#Tendenze
{{{sourceTextContent.title}}}
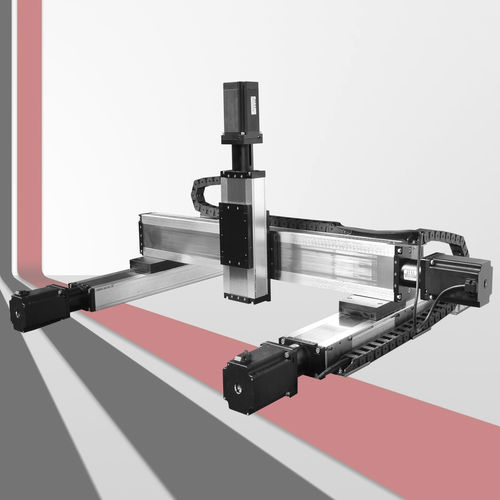
Fasi di posizionamento lineare/tabelle
{{{sourceTextContent.subTitle}}}
Robot cartesiano per il sistema Gantry
{{{sourceTextContent.description}}}
Le fasi di posizionamento e i tavoli sono utilizzati nei sistemi di controllo del movimento per tenere fermo un pezzo in lavorazione e/o per posizionarlo per qualche operazione. Gli stadi o le tavole, siano essi lineari o rotanti, sono per lo più sotto-sistemi di movimento completi. Sono cioè sistemi di movimento composti da un sistema di componenti di controllo del movimento come componenti di movimento lineare, motori o attuatori, encoder, sensori e controllori. Per esempio, gli stadi di posizionamento sono tipicamente assiemi di movimento lineare composti da guide lineari o carrelli e qualche tipo di meccanismo di azionamento.
Gli stadi e le tavole sono utilizzati in una gamma di applicazioni ad alte prestazioni come robot industriali, fibre ottiche e fotonica, sistemi di visione, macchine utensili, assemblaggio, apparecchiature a semiconduttori, lavorazione laser di componenti medicali, microlavorazione, produzione elettronica e altre applicazioni di automazione industriale.
Le fasi possono fornire uno dei diversi tipi di movimento. Possono essere di tipo lineare, rotativo o anche di sollevamento (stadi di posizionamento sull'asse Z). Tra questi, possono essere configurati in molti modi diversi, compreso il movimento in una sola direzione (o asse), in più direzioni (posizionamento X-Y), o per movimenti estremamente piccoli e precisi, come nelle applicazioni di nanoposizionamento dove i movimenti sono nel campo micro o nanometrico.
Anche i meccanismi di azionamento per gli stadi di posizionamento e le tavole possono variare in modo significativo, a seconda di una serie di fattori, tra cui il costo e la precisione desiderata. Ad esempio, gli stadi possono essere di tipo ad azionamento diretto azionati da servomotori lineari o da una combinazione di motori e ingranaggi e giunti, azionati da attuatori lineari o rotativi (sia con attuatori elettrici, sia con attuatori pneumatici o idraulici). Altri metodi possono includere sistemi a cinghia e puleggia, viti a ricircolo di sfere o viti a testa cilindrica.
I requisiti di precisione e accuratezza possono anche dettare decisioni progettuali come i componenti utilizzati nell'assemblaggio di una fase di posizionamento. Un tipo di componente utilizzato nelle fasi in cui si desidera un'affidabilità e un'elevata precisione sono i cuscinetti ad aria. I cuscinetti ad aria sostengono un carico con un sottile film di aria compressa tra gli elementi fissi e quelli in movimento. Essi sono tipicamente indicati come cuscinetti aerostatici, perché una fonte di pressione piuttosto che di movimento relativo fornisce il film d'aria.
A differenza dei cuscinetti ordinari, le superfici di un cuscinetto ad aria non entrano in contatto meccanico, quindi questi sistemi non hanno bisogno di essere lubrificati. Poiché le superfici non si usurano, i sistemi non generano particolato, il che li rende adatti per applicazioni in camera bianca. Quando vengono forniti con aria pulita e filtrata, i cuscinetti possono funzionare senza problemi per molti anni.
Alcuni parametri importanti per la selezione del corretto stadio di posizionamento includono cose come la risoluzione necessaria dell'applicazione (o il più piccolo incremento da spostare o misurare), la ripetibilità e la precisione richieste, e altri parametri meccanici come il gioco e l'isteresi.