#News
I robot e software KUKA preparano gli studenti dell'Università di Rosenheim alla robotica
Diventare futuri esperti nell'utilizzo di robot industriali: questo è lo scopo del laboratorio di montaggio e robotica dell'Università di Rosenheim. Gli studenti imparano a progettare applicazioni concrete all'interno di celle. KUKA collabora ormai d
LBR IIWA ASSOLVE I SUOI COMPITI CON SENSIBILITÀ
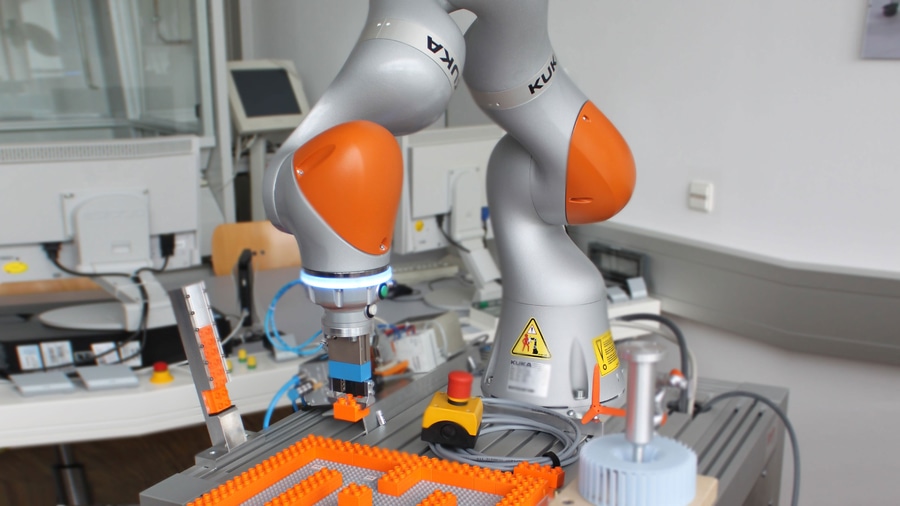
La carriera di molti ingegneri nasce probabilmente già dall'infanzia, quando mattoncini Lego e robot esercitano il loro fascino. Il Professor Christian Meierlohr, direttore del laboratorio di montaggio e robotica dell'Università di Rosenheim, prosegue questa attività: tuttavia, nell'applicazione con l' LBR iiwa di KUKA, a impilare i mattoncini di Lego non sono gli studenti d'ingegneria, ma il robot leggero sensibile a sette assi. L'LBR iiwa afferra i pezzi, li impila e li incastra con sensibilità. MA non solo, il robot leggero sensitivo crea anche labirinti di mattoncini che attraversa con il suo utensile di presa. Gli studenti utilizzano la sua capacità di rilevare ed evitare, in modo sensitivo, ostacoli e collisioni per trovare la via d'uscita dal labirinto. Essendo montato su un carrello da laboratorio costruito appositamente, il robot può essere spostato liberamente nella stanza, in modo tale da poter essere utilizzato in modo flessibile per diversi allestimenti didattici.
MOVIMENTAZIONE DI ELEMENTI CON I MINIROBOT KUKA
Il velocissimo minirobot KR AGILUS sixx è collocato in una cella di apprendimento con un tavolo retroilluminato, un caricatore automatico di pezzi mediante vibrotrasportatore e un sistema di elaborazione di immagini per il riconoscimento dei componenti. In base ai progressi di studio (laurea triennale o specialistica), è possibile gestire diverse attività. Il Pick-and-Place è un tipico scenario di automatizzazione. In questo caso, il robot viene impiegato per afferrare i componenti e posizionarli con precisione. Qui può essere utilizzato anche il sistema di elaborazione di immagini per riconoscere e classificare i vari pezzi. Un'ulteriore attività prevede la programmazione del robot in modo tale da fargli attraversare un labirinto in materiale espanso.
PROGRAMMAZIONE MEDIANTE SIMULAZIONE SOFTWARE
Per quanto riguarda la programmazione invece, con il software di simulazione KUKA.Sim Pro gli studenti possono programmare i robot offline sul PC e testarne l'esecuzione con KUKA.OfficeLite. In tal modo, imparano a creare processi di movimentazione, ad esempio per celle robotizzate per la produzione e il montaggio. Dopo i test simulati, i processi programmati offline possono essere verificati direttamente sulla macchina reale e ottimizzati nella pratica. "La simulazione è un ottimo primo passo per progettare cosa è possibile fare con un robot, ma prima o poi si scoprono i suoi limiti. Per diversi dettagli, il mondo reale si comporta diversamente da quello simulato. Pertanto, è estremamente utile poter trasferire e applicare la progettazione al computer direttamente sul vero robot", afferma il Professor Meierlohr. L'interazione tra le postazioni di simulazione permette inoltre di suddividere gli studenti in piccoli gruppi, consentendo loro di lavorare su più stazioni. Ciò incrementa l'intensità e il successo dell'apprendimento. Inoltre, in questo modo gli studenti eseguono le tipiche attività degli ingegneri, dalla progettazione alla reale applicazione.





