
Vedi traduzione automatica
Questa è una traduzione automatica. Per vedere il testo originale in inglese cliccare qui
#Tendenze
{{{sourceTextContent.title}}}
Assemblaggio robotizzato di connettori ad alta tensione per veicoli elettrici
{{{sourceTextContent.subTitle}}}
Capolavoro per il Messico
{{{sourceTextContent.description}}}
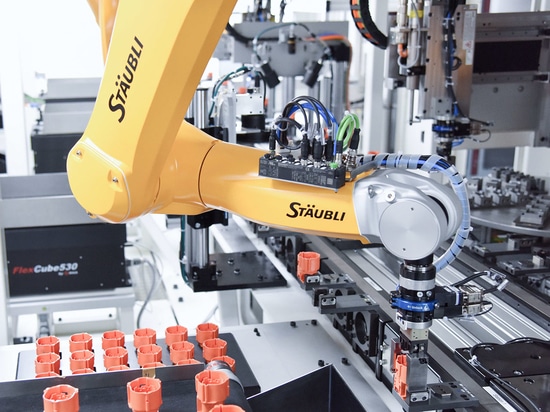
Sei robot Stäubli montati a soffitto, 13 sistemi di elaborazione delle immagini e il grande know-how del produttore di sistemi garantiscono un assemblaggio e un'ispezione rapidi, affidabili ed efficienti di 5.000.000 di connettori ad alta tensione per veicoli elettrici e ibridi in Messico.
IL COMPITO
Assemblaggio assistito da robot di connettori ad alta tensione per veicoli elettrici
L'assemblaggio di cinque milioni di connettori ad alta tensione all'anno per veicoli elettrici e ibridi pone requisiti elevati ai sistemi automatizzati. Questo è particolarmente vero quando è necessario un riattrezzamento giornaliero in base alle varianti. Un sistema all'avanguardia garantisce una produzione altamente flessibile.
La mobilità elettrica è sulla bocca di tutti. E sta anche stimolando la domanda di soluzioni di assemblaggio per componenti elettrici da parte di produttori di macchine speciali come Eberhard AG. Un fornitore internazionale di automobili con un progetto impegnativo si è rivolto all'azienda con sede a Schlierbach.
In particolare, il progetto prevedeva la pianificazione e l'implementazione di un sistema di assemblaggio in grado di gestire 5.000.000 di connettori ad alta tensione all'anno. Il sistema doveva gestire non solo l'assemblaggio vero e proprio, ma anche l'ispezione ottica di tutte le fasi di assemblaggio, i test di tenuta dei connettori e, infine, il loro imballaggio in vaschette.
SOLUZIONE
Un capolavoro di automazione in un design compatto
Osservando il sistema, sorge spontanea una domanda: Come è possibile implementare in uno spazio così compatto un sistema di assemblaggio che comprende 13 stazioni, sei robot e 13 sistemi di visione? La risposta: La disposizione dei robot in modo che siano sospesi sopra le stazioni migliora notevolmente l'efficienza dello spazio.
Tutti e sei i robot sono modelli Stäubli a sei assi TX2-60L ad alta precisione, nella versione a sbraccio esteso. I robot sono stati scelti non solo per la loro dinamica, ma anche per il design compatto, l'interfaccia tra alimentatori e telecamere e l'affidabilità senza pari. Quattro dei sei robot sono dotati di telecamere per riprendere parti del sistema di alimentazione.
L'assemblaggio dei connettori segue un concetto chiaro: Dopo ogni fase viene eseguito un test di qualità. Per esempio, alla Stazione 1: qui il primo TX2-60L prende un alloggiamento del connettore da un trasportatore di alimentazione e lo colloca in un portapezzi, che lo trasporterà attraverso tutte le stazioni del sistema. Nella stazione 2 viene effettuato un immediato controllo ottico di qualità, in cui vengono verificati la codifica e il colore.
Assemblaggio immediatamente seguito da ispezione: secondo questo principio, l'alloggiamento del connettore passa attraverso tutte le stazioni successive fino al completamento. Prima che l'ultimo dei sei robot Stäubli trasferisca il connettore ad alta tensione completamente assemblato al sistema di pallettizzazione, viene eseguito un altro test di tenuta. Per mantenere il tempo di ciclo, Eberhard si affida a una tavola rotante con quattro stazioni e un dispositivo di prova quadruplo. Grazie a questa soluzione, i test non causano colli di bottiglia.
USO DEL CLIENTE
Rifacimento in 10 minuti
Inizialmente, solo tre versioni sono in esecuzione sul sistema, ma il loro numero aumenterà presto in modo significativo. Grazie al design altamente flessibile del sistema, questo sviluppo non sarà un problema per l'utente. Il passaggio dall'ultima parte del prodotto attuale alla prima parte di quello successivo può essere effettuato in 10 minuti.
Anche durante la fase di pre-avviamento, il sistema è stato in grado di battere il tempo di ciclo richiesto di tre secondi. Attualmente, il tempo di ciclo è di circa 2,7 secondi per connettore ad alta tensione, corrispondente esattamente alla simulazione effettuata in precedenza in stretta collaborazione con Stäubli Robotics. Il fatto che il risultato della simulazione corrisponda pienamente alla realtà sottolinea la precisione con cui oggi si possono simulare i processi quando si utilizzano gli strumenti giusti. Inoltre, Eberhard vede il potenziale per un'ulteriore ottimizzazione del tempo di ciclo attraverso la messa a punto in loco.

{{medias[180954].description}}
{{medias[180955].description}}



